Replies: 11 comments 64 replies
-
|
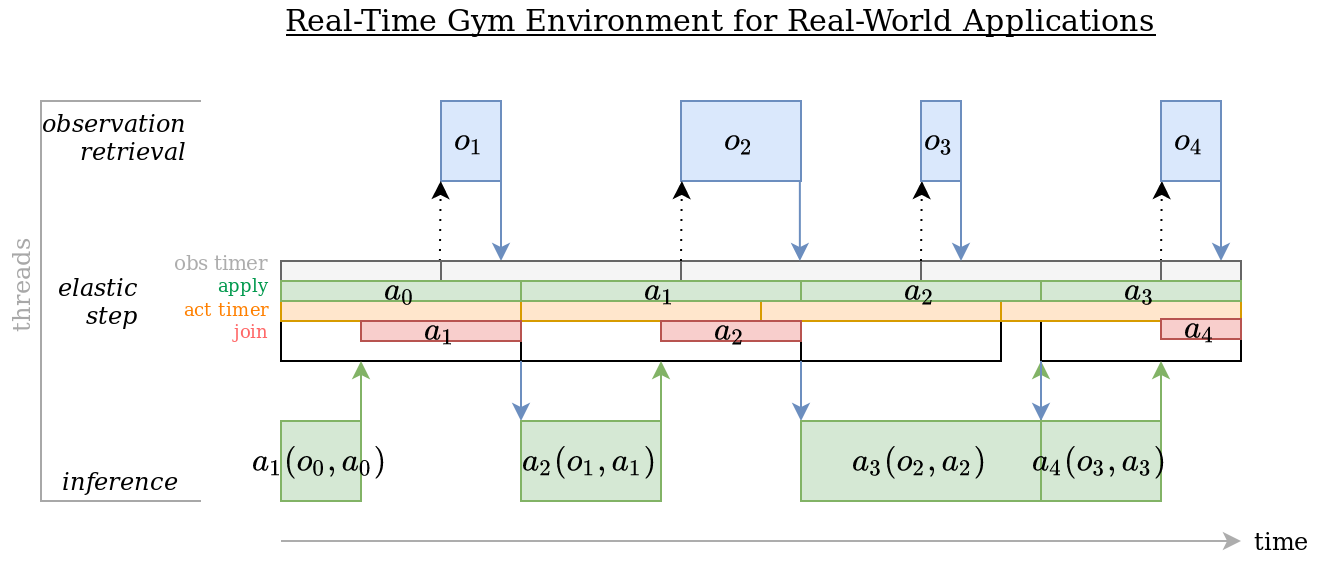
Hi, sorry I am not 100% sure I understand your question. Are you maybe confusing history of images and history of actions here? In tmrl, the history of 4 images is used for the model to evaluate the dynamics of the car (velocity, acceleration...), thus it is entirely part of the observation space, regardless of real-time delays. On top of that, rtgym automatically appends an history of actions. The length of this history depends on the real-time delays of your environment. In TrackMania, the real time delay is 2 time-steps (1 for inference, and 1 to account for the fact that taking a screenshot is not instantaneous). Thus, in Trackmania, the action buffer contains the 2 last actions. But these actions being automatically added to your observations by rtgym, you need not to worry about them when defining your observation space, as rtgym will in fact also add them automatically to your observation space. |
Beta Was this translation helpful? Give feedback.
-
|
Indeed I was confusing the 2 topics. Do you think if you had access to the higher order parameters in the game, like acceleration, slip ratio of the tyres, etc, you would might need just 1 or 2 images? |
Beta Was this translation helpful? Give feedback.
-
|
If you have access to low-level information, you don't need images at all. For instance you can look at what Laurens did : he doesn't use images at all. |
Beta Was this translation helpful? Give feedback.
-
|
Unfortunately, while I have a lot of low level information, track limits are not something I have. But so far, images are the only way I can go (I think). Might test different inputs if I ever get basics working, i.e. tmrl implementations and some form of deep rl algo. |

Beta Was this translation helpful? Give feedback.
-
|
I may need some more support. My head is still a bit mush on a few things. https://github.com/yannbouteiller/rtgym/blob/213df48611b7f113a1db624b0b66af1db48dd23a/rtgym/tuto/tuto.py#L1 DEFAULT_CONFIG_DICT is defined further down below, so I do not understand why there is an import from rtgym. Also in that tutorial, I cannot find the get_observation() method... Sorry many noob questions. |
Beta Was this translation helpful? Give feedback.
-
|
Hi :) If you look at this line, the default configuration dictionary is not redefined, it is only modified. In
In TrackMania, to get 4 images, we use a FIFO queue of lenght 4. On reset we take a screenshot and clone it 4 times, and on get_obs_rew_terminated we put a new screenshot in this queue and discard the oldest screenshot in the queue. |
Beta Was this translation helpful? Give feedback.
-
|
Thanks. get_observation_space() simply returns boxes with their possible range of values (I hope that part is right). On the other hand...
But I am only now noticing that this is something recent: Regarding this text here: |

Beta Was this translation helpful? Give feedback.
-
|
I usually use pytorch but in theory you can use any framework you like with tmrl, it is not supposed to be pytorch-dependent anymore (but I haven't tried to implement tmrl pipelines in tensorflow yet). |
Beta Was this translation helpful? Give feedback.
-
|
What is info in get_obs_rew_terminated_info ? |
Beta Was this translation helpful? Give feedback.
-
|
Oh one more thing. |
Beta Was this translation helpful? Give feedback.
-
It is for Gymnasium environments in general, when you want your environment to output metadata that are not part of the observation. This may be useful for debugging, for instance |
Beta Was this translation helpful? Give feedback.
-
It is just a design choice: in the TrackMania pipeline we chose to normalize everything between 0 and 1 in the In fact this is an interesting discussion in terms of optimization of the At the moment, the Imagine we want to be optimal to the extreme in how we design our training pipeline. Then images must be output in uint8 format so that they don't get reconverted from float32 to uint8 by the The very-optimal thing to do right now with the design choices we have built into Anyway, these are very advanced technical considerations which have more to do with future development of the |
Beta Was this translation helpful? Give feedback.
-
|
I've been stuck on some warnings like forever... I am starting to wonder if this is caused by some behind the scenes behaviour of rtgym... So first off, I tried to use int32 for most of the observation space.... def get_observation_space(self):
# eXXXX for engineXXXX
# vXXX for vehicleXXX
eSpeed = spaces.Box(low=0, high=10000, shape=(1,), dtype='int32')
eBoost = spaces.Box(low=0, high=10000, shape=(1,), dtype='int32')
return spaces.Tuple((eSpeed, eBoost))and def reset(self, seed=None, options=None):
self.inititalizeCommon() #only used to debug this
eSpeed, eBoost, eGear, vSpeed, vSteer, vPosition, display = self.getDataImage()
obs = [eSpeed, eBoost]
# self.reward_function.reset() # reward_function not implemented yet
return obs, {}where def getDataImage(self):
self.server.receiveOneFrame()
eSpeed = np.array(self.server.myData.VS.engSpeed, dtype='int32')
eBoost = np.array(self.server.myData.VS.engBoost, dtype='int32')
eBoost = np.array(self.server.myData.VS.engBoost, dtype='int32')
eBoost = np.array(self.server.myData.VS.engBoost, dtype='int32')
eBoost = np.array(self.server.myData.VS.engBoost, dtype='int32')
eGear = np.array(self.server.myData.VS.engGear, dtype='int32')
vSpeed = np.array(self.server.myData.VS.speed, dtype='int32')
vSteer = np.array(self.server.myData.VS.steer, dtype='int32')
self.raceState = self.server.myData.GS.raceState
vPosition = np.array((self.server.myData.posVect.x, self.server.myData.posVect.y), dtype='int32')
display = self.server.pic
return eSpeed, eBoost, eGear, vSpeed, vSteer, vPosition, displayWith the above methods, I always get 2 warnings: and To separate things out, I changed everything to float32, and the latter warning disappears... But the not within the space is confusing. obs, _ = env.reset()
print(obs)
print(env.observation_space)and get: I recognise the first 2 items, but not the last 4 - is this the action history from rtgym? |
Beta Was this translation helpful? Give feedback.
-
|
Hi, this happens all the time with Gymnasium, because it is very strict on the action and observation space. The 4 items that you don't recognize are the action buffer appended by rtgym, because you selected an action buffer of length 4 in your configuration dictionary (it usually needs to be at least of length 1 or 2 to ensure the Markov property in real-time environments). The warning tells you that the observation is not in the observation space because if you look at your 2 first elements in your observation, they are simple floats, not lists. Gym expects boxes to be lists, so instead of |
Beta Was this translation helpful? Give feedback.
-
|
Thanks. Sorry. |
Beta Was this translation helpful? Give feedback.
-
|
It is just because it has a shape of (1,) in the numpy convention. Shape (3,) is
|
Beta Was this translation helpful? Give feedback.
-
|
Finally no warnings (for now) except the image layout but... I'll review the alternative to that at a future time. Now for trying to implement a reward function. |
Beta Was this translation helpful? Give feedback.
-
|
No, it is the pickle file in which we store the demo trajectory for the TrackMania pipeline, if you are developing for another game, you will want to compute rewards in an entirely different fashion unless you have access to an API similar to OpenPlanet. |
Beta Was this translation helpful? Give feedback.
-
|
For my initial implementation, I do have something similar to a trajectory line. Behaviour: I could make it spit the distance from the trajectory or even the "id" (which would be the row-position of the closest distance to the trajectory). |
Beta Was this translation helpful? Give feedback.
-
|
Maybe specific questions...
What does "more reward" mean here? In this reward function, "speed" of moving through position idx is not factored it seems, what is encouraging speed in acquiring reward? |

Beta Was this translation helpful? Give feedback.
-
|
I think what is slow in your numpy benchmark is to re create b and convert it implicitly into a numpy array at every loop. Reward is positive when the car moves forward. There is no "right index", the more positions have been passed since the previous timestep, the higher (better) the reward. If the index is the same, it means we did not move, and thus the reward is 0. Rewinding is to check that the car didn't move backward yes. If it did, we want to update its position. "More markovian reward" here simply means that failing to do this would introduce non-markovness in the environment. |
Beta Was this translation helpful? Give feedback.
-
|
Where is this used please? tmrl/tmrl/custom/custom_gym_interfaces.py Line 87 in 8d9689c |
Beta Was this translation helpful? Give feedback.
-
|
You don't need this, this is probably an artefact from an old debugging code that someone forgot to remove |
Beta Was this translation helpful? Give feedback.
-
|
Also, is there a way for me to work with discrete inputs (throttle on/off, brake on/off, and steering on/off)? |
Beta Was this translation helpful? Give feedback.
-
|
Sure, you can either use Discrete in your action space or simply use Box and select the highest value of the output vector as corresponding to your selected action in |
Beta Was this translation helpful? Give feedback.
-
|
Here is the state of things: Todo: Observation warning (about it being out of range of observation space). Not sure what caused this issue, as I had previously resolved it. I hate debugging these warnings, but eh... Beyond that, I am wondering what is next, I am thinking the next step is implementing the actual ML algorithms.
I am confused why obs[3] is the image and not obs[0].
|
Beta Was this translation helpful? Give feedback.
-
|
What is this |
Beta Was this translation helpful? Give feedback.
-
|
So to summarize what I went through... That now looks like this: def env_creator(env_config):
env = gymnasium.make("real-time-gym-v1", config=my_config)
return env # return an env instancethe extra () was an issue. Then next problem: algo = ppo.PPO(env="gt-rtgym-env-v1", config=ppoconfig)Needed that env= Then next problem I faced seemed bizarre. My environment tried to connect to the emulator twice even though I only had 1 rollout worker. ppoconfig["disable_env_checking"] = TrueThen I faced some strange error: ValueError: Outputs of true_fn and false_fn must have the same type: float64, float32But a bit of searching lead me to believe that this is something related to tensorflow 1. So setting: ppoconfig["framework"] = "tf2"or ppoconfig["framework"] = "torch"Which seems in a working rrlib setup :) But at least no errors to this stage: |
Beta Was this translation helpful? Give feedback.
-
|
So.... now I tried training... This is SOOOOOOOOOO cool, it is like watching a child being born. File "C:\Users\nadir\anaconda3\envs\GTAI2\lib\site-packages\ray\rllib\models\preprocessors.py", line 74, in check_shape |
Beta Was this translation helpful? Give feedback.
-
|
Full exception: |
Beta Was this translation helpful? Give feedback.
-
|
And the sort of behaviour in action: |
Beta Was this translation helpful? Give feedback.
-
|
On another note... When it reaches the ep_max_length, it terminates with this exception: Is this expected? |
Beta Was this translation helpful? Give feedback.
-
|
Yes, you cannot continue a truncated episode. Instead of "while not terminated" you want "while not (terminated or truncated)". If you want truncated to always be False, set the maximum episode length to numpy.inf in the rtgym configuration dictionary. |
Beta Was this translation helpful? Give feedback.
-
|
What should return the truncated flag? |
Beta Was this translation helpful? Give feedback.
-
|
When I set the ep_max_length, how does it end the episode? Does it send a truncated? |
Beta Was this translation helpful? Give feedback.
-
|
Also, is : |
Beta Was this translation helpful? Give feedback.
-
|
No, that probably comes from rllib. To answer your other question, when ep_max_length is reached, the episode is truncated, yes. This means that the episode has been ended by the (unobserved) time limit rather than by reaching a terminal state. |
Beta Was this translation helpful? Give feedback.
-
|
This is a very python noob question that I am struggling with: class MyGranTurismoRTGYM(RealTimeGymInterface):
def __init__(self, debugFlag=False, img_hist_len=3, rrlib=True, modelMode=2):
self.agent = "SAC"
self.modelMode = modelMode # 2 = reduced observation
if self.rrlib == False:
self.renderingThread = Thread(target=self._renderingThread, args=(), kwargs={}, daemon=True)
self.inititalizeCommon() # starts the TCP server and waits for the emulator to connectI have a lot of manually coded flags / arguments in my RTGYM class. my_config = DEFAULT_CONFIG_DICT
my_config["interface"] = MyGranTurismoRTGYM
my_config["time_step_duration"] = 0.05
my_config["SAC"] = True
my_config["modelMode"] = 2
def env_creator(env_config):
env = gymnasium.make("real-time-gym-v1", config=my_config)
return env # return an env instanceHow can I do that? I am not totally familiar with how config dicts work (other than I know it is a dictionary, and it is used for the configuration here). |
Beta Was this translation helpful? Give feedback.
-
|
The rtgym configuration dictionary has two entries exactly for that : interface_args (a tuple) and interface_kwargs (a dictionary), to pass the arguments and keyword arguments of your |
Beta Was this translation helpful? Give feedback.
-
|
Cool. |
Beta Was this translation helpful? Give feedback.
-
|
Well, for instance your interface has 4 kwargs here, and you can do the following: my_config["interface_kwargs"] = {
'debugFlag': False,
'img_hist_len': 3,
'rrlib': True,
'modelMode': 2
} |
Beta Was this translation helpful? Give feedback.
-
So, finally got my hands dirty and started to write up my own RealTimeGymInterface.
I started with what I hoped the be the easiest method - get_observation_space()
But I got stuck/doubts.
So the rtgym readme states:
Note that, on top of these observations, the rtgym framework will automatically append a buffer of the 4 last actions, but the observation space you define here must not take this buffer into account.and in that example, the method returns
return spaces.Tuple((pos_x_space, pos_y_space, tar_x_space, tar_y_space))(just a tuple of 4 boxes).
Great. Then I had a look at the tmrl implementation (non Lidar), and I notice:
img_hist_len: int: history of images that are part of observationsand later...
tmrl/tmrl/custom/custom_gym_interfaces.py
Line 234 in 8d9689c
So... is img handled in a different way from there of the boxes?
Beta Was this translation helpful? Give feedback.
All reactions