This page lists open source contributions made by Team R3 of Ryerson University in Toronto, Canada and built for the University Rover Challenge (URC) 2017. We share our rover software architecture diagram and several ROS packages for the URC competition.
Full source code for our rover: https://github.com/danielsnider/URC
Full documentation in a book chapter: Book Chapter - University Rover Challenge Tutorials and Team Survey.pdf
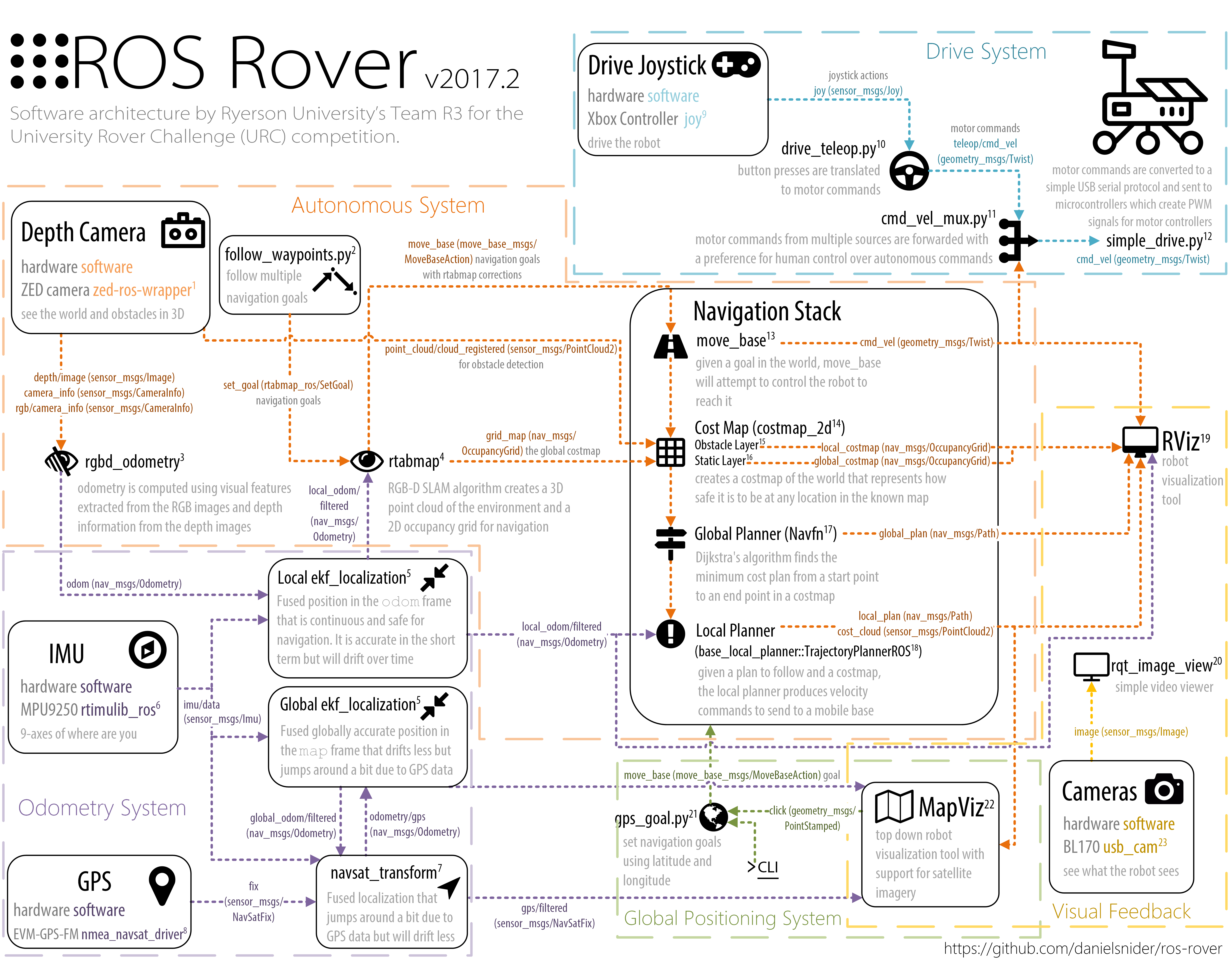
Rover Diagram in Visio Format: Rover_Diagram.vsdx
More glory shots of our rover: https://www.youtube.com/watch?v=DtilGB2vnQI


A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
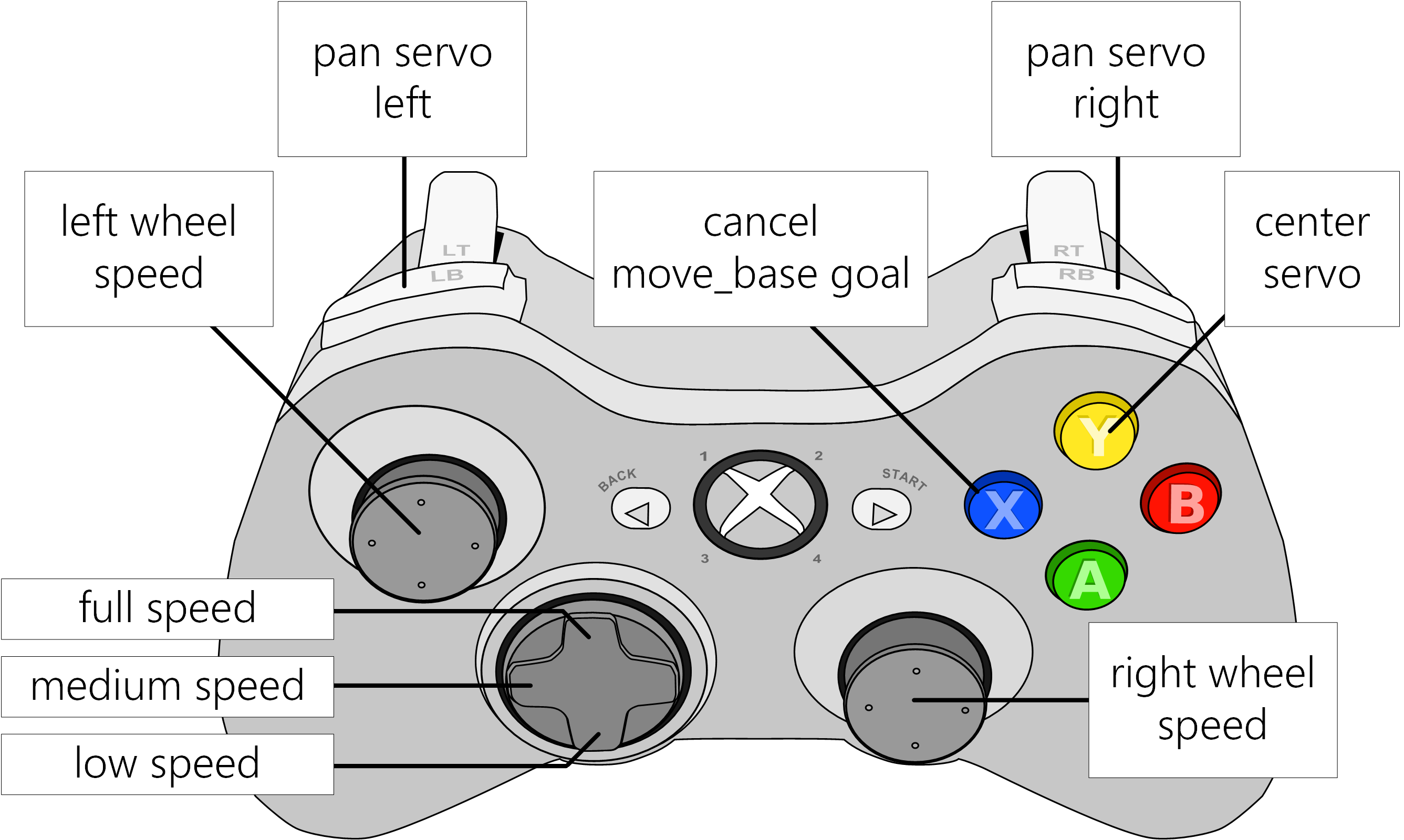

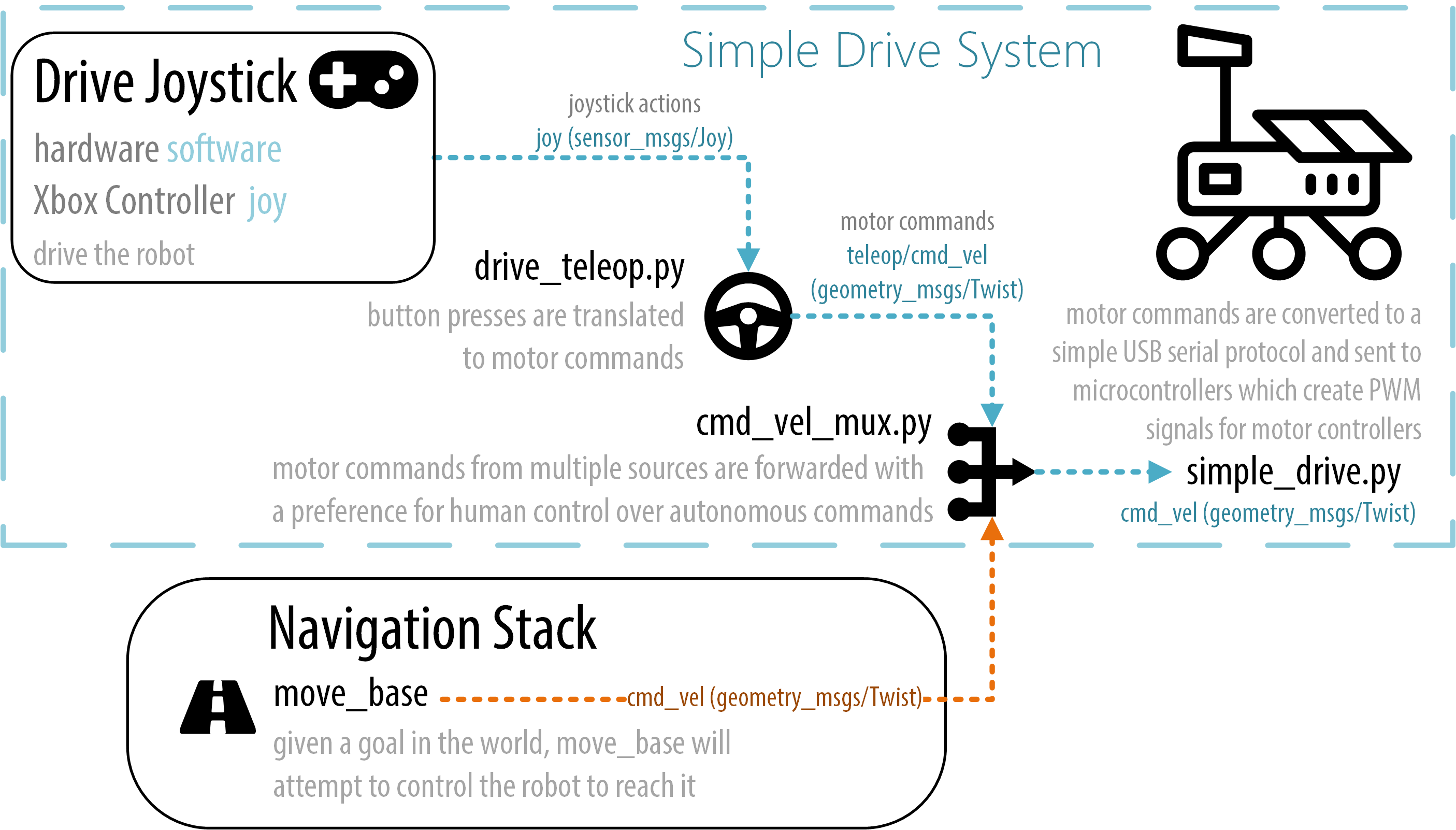
Full documentation on wiki: http://wiki.ros.org/simple_drive
Simple velocity controlled arm. Teleoperation software and firmware.

Full documentation on wiki: http://wiki.ros.org/simple_arm
Create panoramas in ROS using image snapshots or multiple video streams.

Full documentation on wiki: http://wiki.ros.org/hugin_panorama
A package that will buffer move_base goals until instructed to navigate to all waypoints in sequence.

Full documentation on wiki: http://wiki.ros.org/follow_waypoints
Add an indication of scale and compass to images.

Full documentation on wiki: http://wiki.ros.org/image_overlay_scale_and_compass
If your robot loses connection to the base station it will stop motors or navigate home.
Full documentation on wiki: http://wiki.ros.org/lost_comms_recovery
Set a ROS navigation goal using latitude and longitude.
Full documentation on wiki: http://wiki.ros.org/GPS_goal
Easily use MapProxy in a docker container to proxy Google Maps satellite view into a WMTS tile service so that it can be viewed by ROS's MapViz Tile Map plugin. Support for offline maps after loading once, maps stay cached. For outdoor robotics and vehicles.

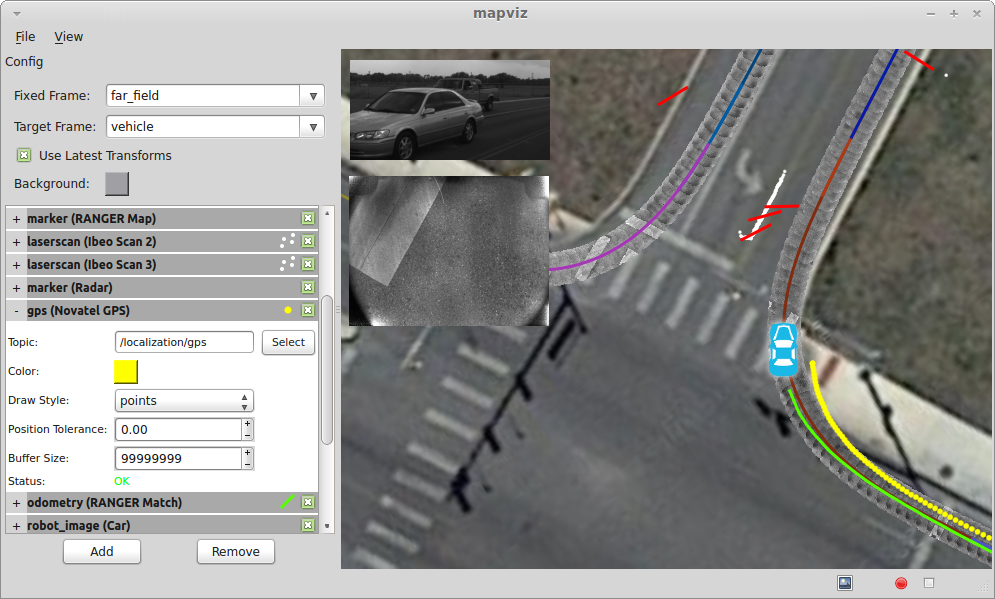
Full documentation on: https://github.com/danielsnider/MapViz-Tile-Map-Google-Maps-Satellite